- 검사에 필요한 모든 기능을 제공하는 Compact한 장비
(검사 알고리즘, 내장렌즈 및 Ring LED조명(CS-mount 모델은 별도))
- 이상유무 확인이 가능한 LED Status표시
- PC없이 Monitor로만 검사결과 확인 가능
- M12 연결기술 - 안정적인 전원, 전기연결 용이, 오류방지
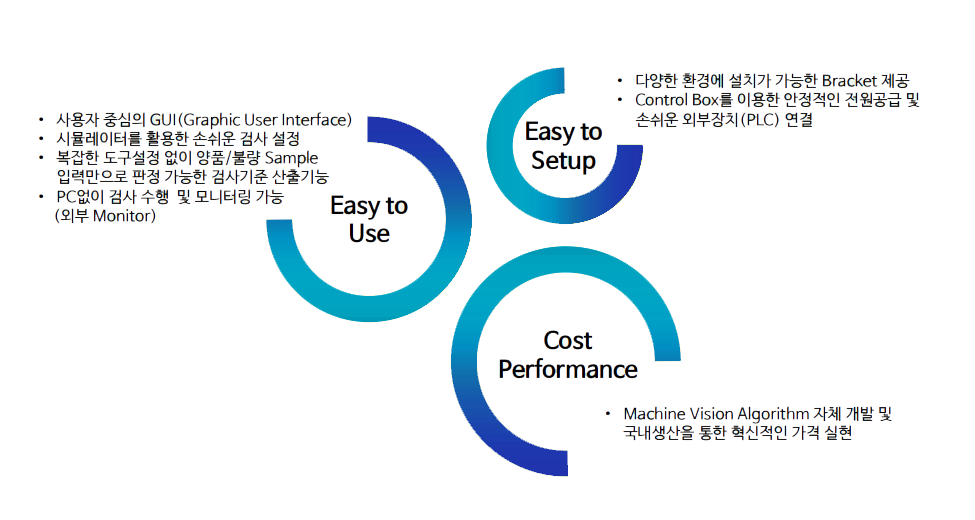
- 간단하고 쉬운 설치
- 국내 개발 및 제조로 합리적인 가격 실현
- 사용자 중심의 GUI(Graphic User Interface)
- 국/영문 Simulator 제공
- 사용자 이해를 높이기 위한 ‘설명 및 도움말’ 기능
- 검사 목적 및 제품에 따라 다양한 도구 제공
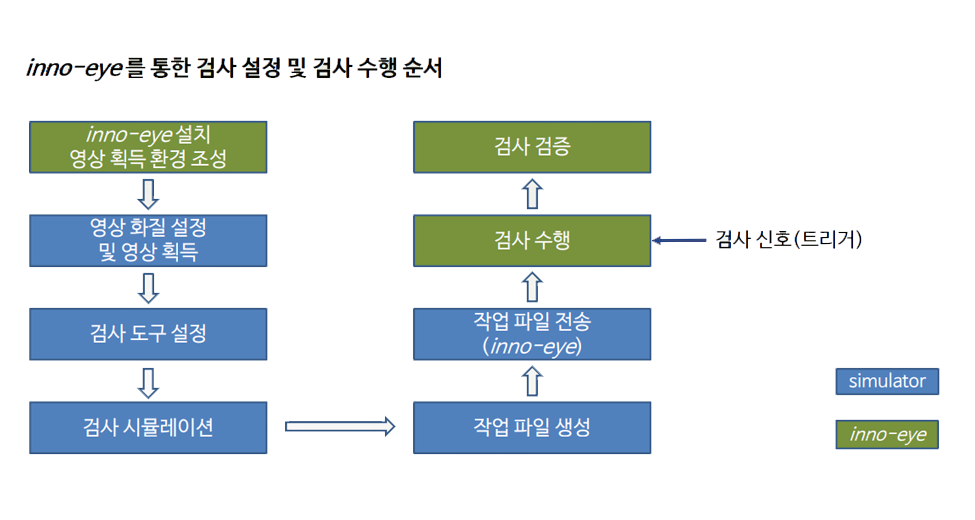
- 검사 파라미터 최소화를 통한 손쉬운 검사 설정 및 시뮬레이션
- Machine Learning 기능으로 복잡한 도구 설정 없이 양품/불량
Sample 입력만으로 판정 가능한 검사 스펙 도출
inno-eye Simulator
inno-eye 검사도구
분 류
도 구 명
세 부 설 명
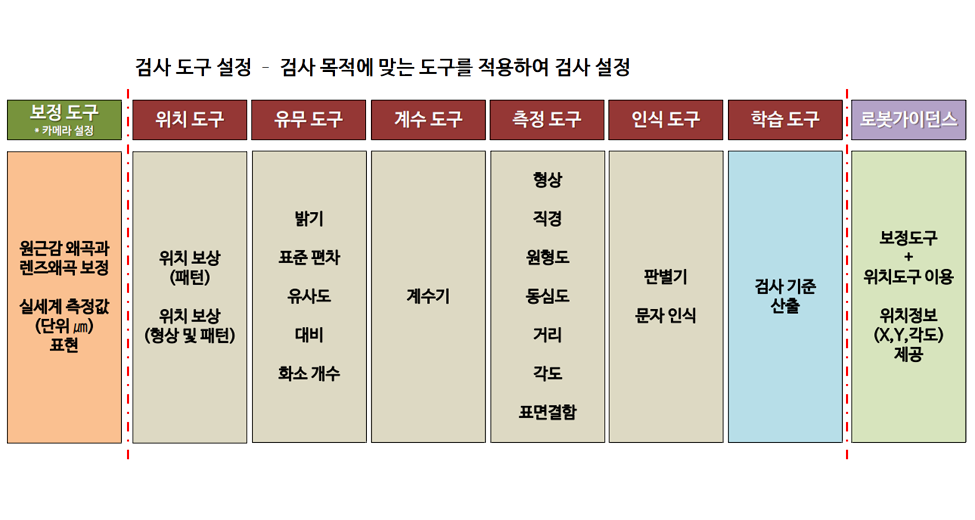
위치 도구
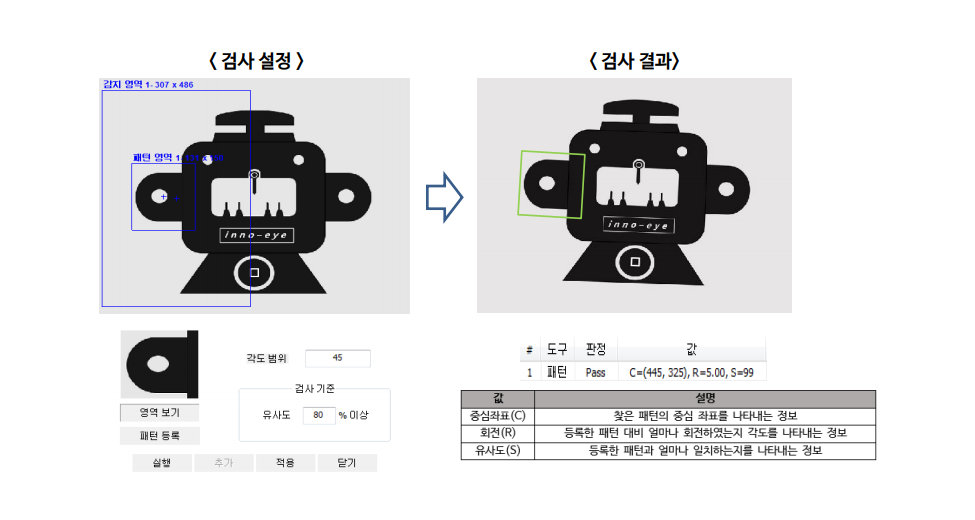
위치 보상(패턴)
위치 보상(형상 및 패턴)
검사할 부품의 자세 정보(패턴/회전)를 계산하여 부품의 위치보상
유무 도구
밝기
표준편차
유사도
대비
화소 개수
· 검사 영역 내의 평균 밝기를 계산, 설정한 밝기 범위로 양품/불량 판단
· 검사 영역 내의 표준편차를 계산, 설정한 표준편차 범위로 양품/불량 판단
· 등록한 패턴과의 유사도 값을 계산, 설정한 유사도 범위로 양품/불량 판단
· 검사 영역 내의 대비 값을 계산, 설정한 대비 범위로 양품/불량 판단
· 검사 영역에서 설정한 밝기 범위 안의 화소 개수로 양품/불량 판단
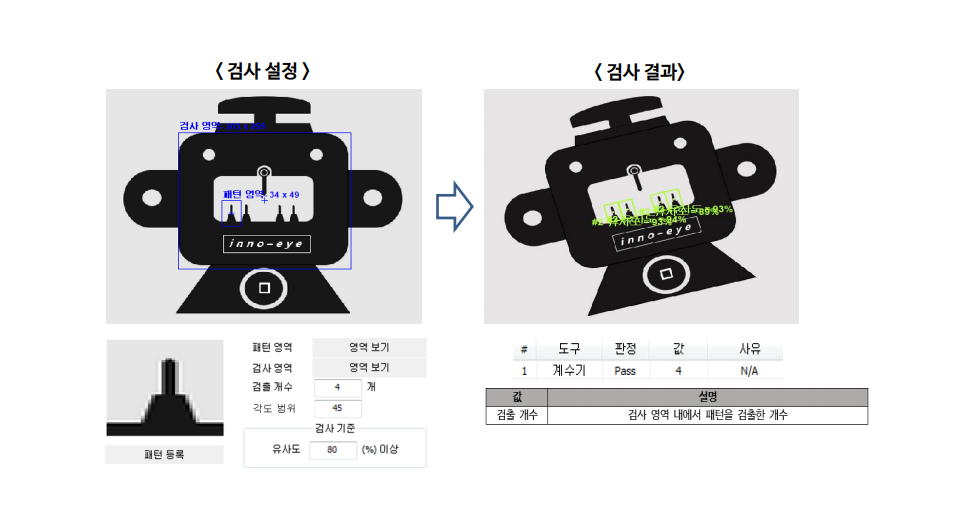
계수 도구
계수기
검사 영역 내에서 등록한 패턴과의 유사도 값이 설정한 유사도 값 이상인 것을 카운팅,
설정한 개수와 일치 여부로 양품/불량 판단
검사 도구
형상
직경
원형도
동심도
거리
각도
표면결함
· 블럽의 면적/둘레/각도/중심좌표를 계산 후 입력한 기준 값과 비교 검사
· 영상에서 원의 직경을 계산, 기준 값과 비교하여 검사를 수행
· 부품이나 부품 내 특정영역이 얼마나 원에 가까운지를 계산, 기준 값과 비교 검사
· 지정한 두 원의 중심 사이의 거리를 측정, 기준 값과 비교 검사
· 영상 안에 포함되는 다양한 특징점(점, 선, 원, 덩어리(blob))들 간의 거리 측정
· 영상에서 두 모서리가 이루는 각도를 측정, 기준 값과 비교 검사
· 물체 표면에 존재하는 흠집이나 결함의 크기와 둘레를 측정, 기준 값과 비교 검사
인식 도구
판별기
문자학습
문자인식
· 부품의 패턴과 형상을 분석, 부품을 판별
· 패턴을 종류별로 등록하여 학습기를 생성, 패턴이 등록한 패턴 중 어떤 것인지 판별
· 인식될 문자들을 등록하고 이를 이용, 지정한 영역에서 등록한 문자를 인식
학습도구
사용자가 양품과 불량 샘플을 등록, 양품/불량을 구분하기 위한 기준을 자동으로 산출
하나의 패턴을 등록하여 기준 위치로 설정, 이 위치를 기준으로 부품의 이동 및 회전 정보를 계산
부품의 크기는 변화하지 않고 부품의 이동 및 회전이 발생하는 경우에 적용
검사 영역 내에서 등록한 패턴과의 유사도 값이 설정한 유사도 파라미터 값 이상인 것을 찾아 개수를 카운팅하고
그 개수가 설정한 검출 개수와 일치하면 양품으로 판단, 그렇지 않은 경우 불량으로 판단
만약 등록한 패턴이 회전할 경우 회전이 발생할 수 있는 최대 각도 범위를 설정하면 회전한 패턴도 탐색 가능
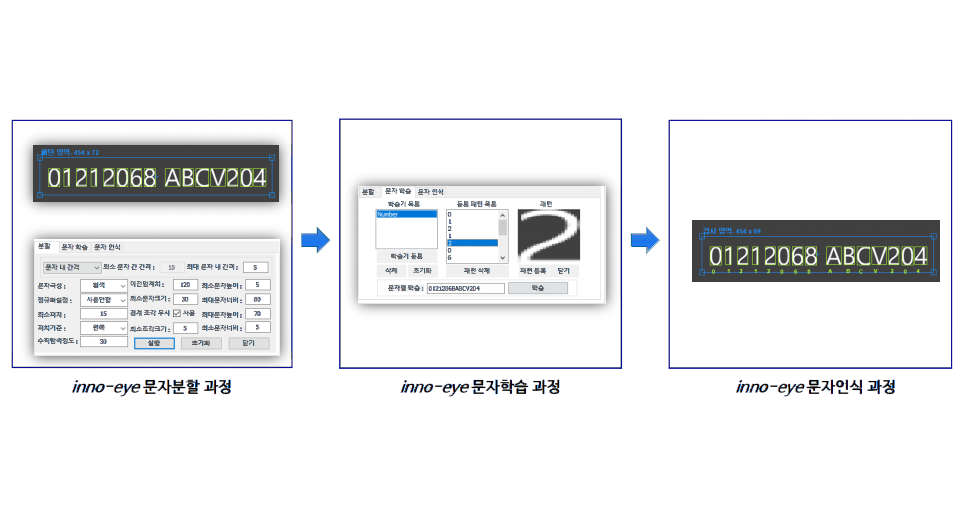
신규 Update 및 추가 검사도구 - 문자인식도구
※ OCR(Optical Character Recognition)
문자영상을 획득하여 컴퓨터가 편집 가능한 문자코드 형식으로 변환하는 소프트웨어
Segmentation
Training
Recognition
일반적인 영상으로부터 같은 성질을 갖는 의미 있는
부분(밝기, 운동 방향, 색깔 등)들을 병합시켜
분할된 영상을 얻는 과정
Segmentation된 문자와 입력 문자를 매칭하여
Segmentation된 패턴을 저장하는 과정
Training된 패턴과 입력 영상의 문자를 비교하여
입력영상의 문자와 패턴의 유사도를 확인하는 과정
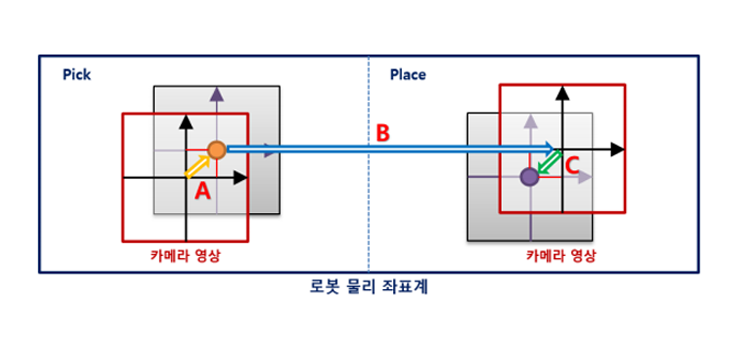
검사 표면에 부정확하게 위치하고 있는 물체를 2차원 머신비전을 이용, 로봇에게 위치를 정확하게 안내하는
기능으로써 Pick & Place와 같은 반복적인 작업을 처리
보정 도구를 이용하여 카메라 영상의 원근감 왜곡과 렌즈 왜곡을 보정. 보정이 끝나면 위치도구를 이용하여
영상 영역에서 학습된 물체를 확인하고 그 중심 좌표를 획득. 획득한 좌표와 영상의 기준점의 차를 계산하여
물체의 상대 위치를 계산. 계산 결과는 실세계 단위로 나타내어 로봇의 이동 거리를 계산하여 검사 영역에서
로봇이 물체에 접근하도록 정보(X, Y, 각도)를 제공
로봇 이동 프로세스
A. 로봇은 물리 좌표계 Pick 영역에 위치한 상태에서 현재 로봇의 위치와 카메라의 영상에서 물체의 위치를 계산하여
상대거리를 계산하고, 그 거리만큼 이동하여 물체의 Pick Position에 위치
B. 로봇은 물체를 Pick한 다음, 물리 좌표계의 Place 영역으로 이동
C. 로봇은 물리 좌표계 Place 영역에 위치한 상태에서 현재 로봇의 위치와 카메라의 영상에서 물체의 위치를 계산하여
상대거리를 계산하고, 그 거리만큼 이동하여 물체의 Target Position에 위치